- Bosh sahifa
- Referatlar
- Mexanika
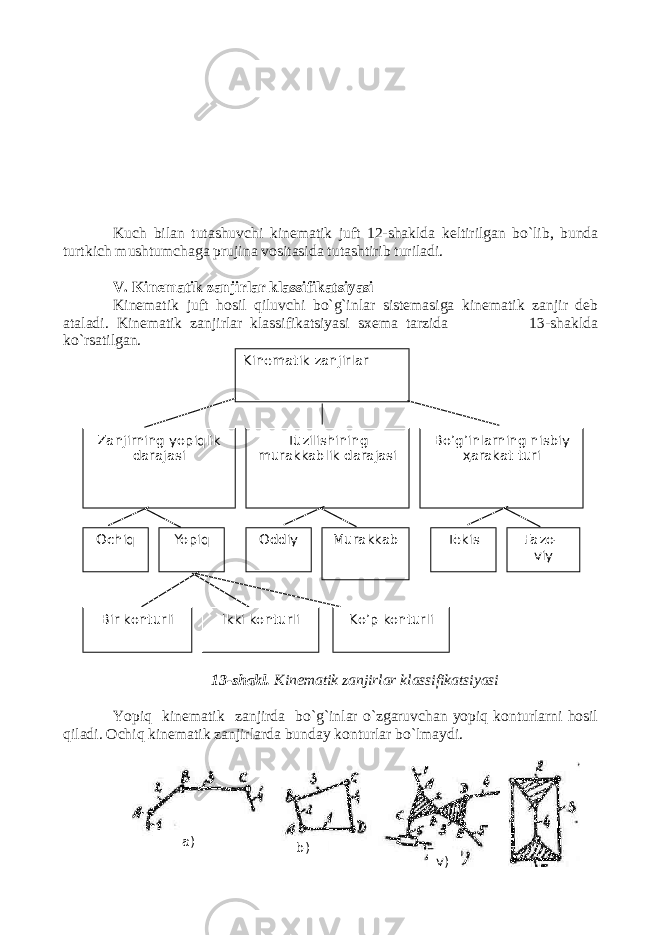
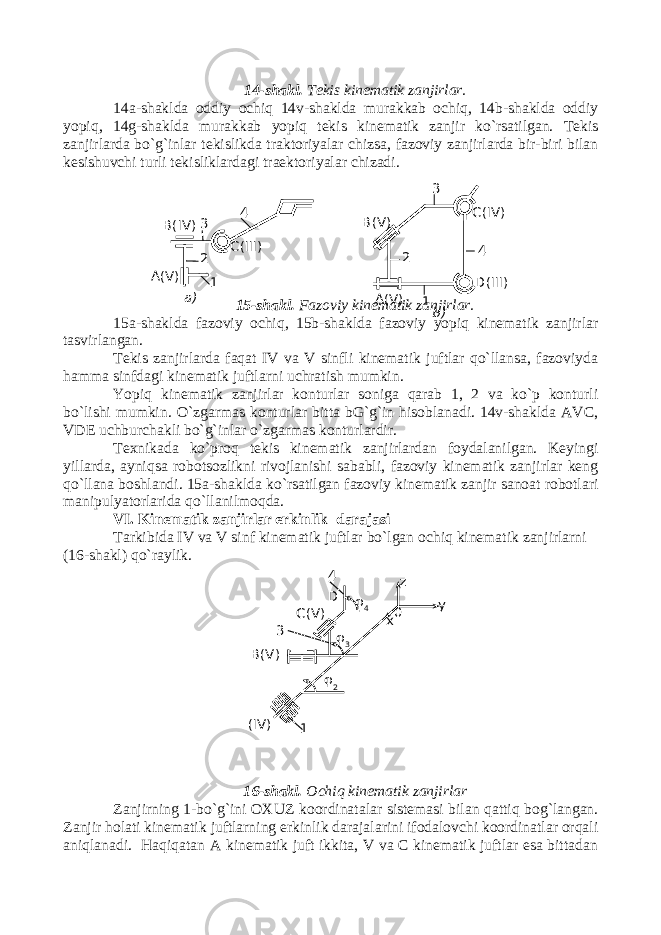
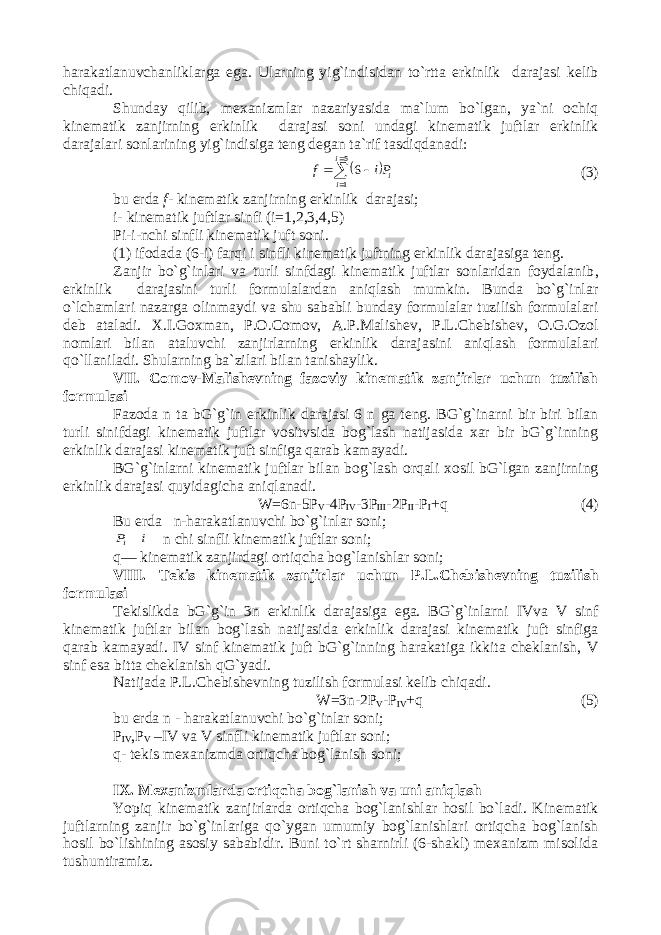
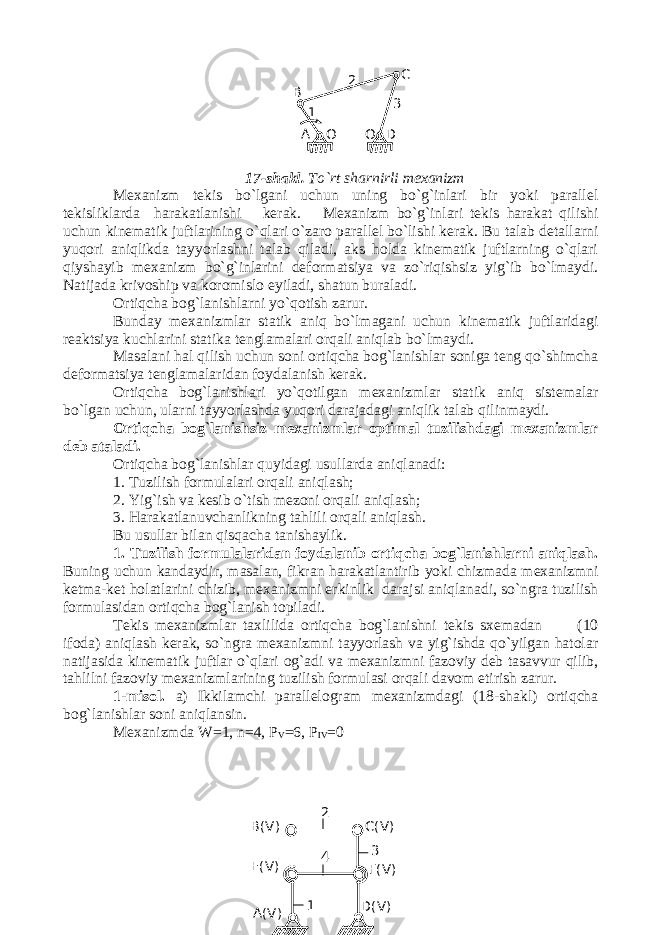
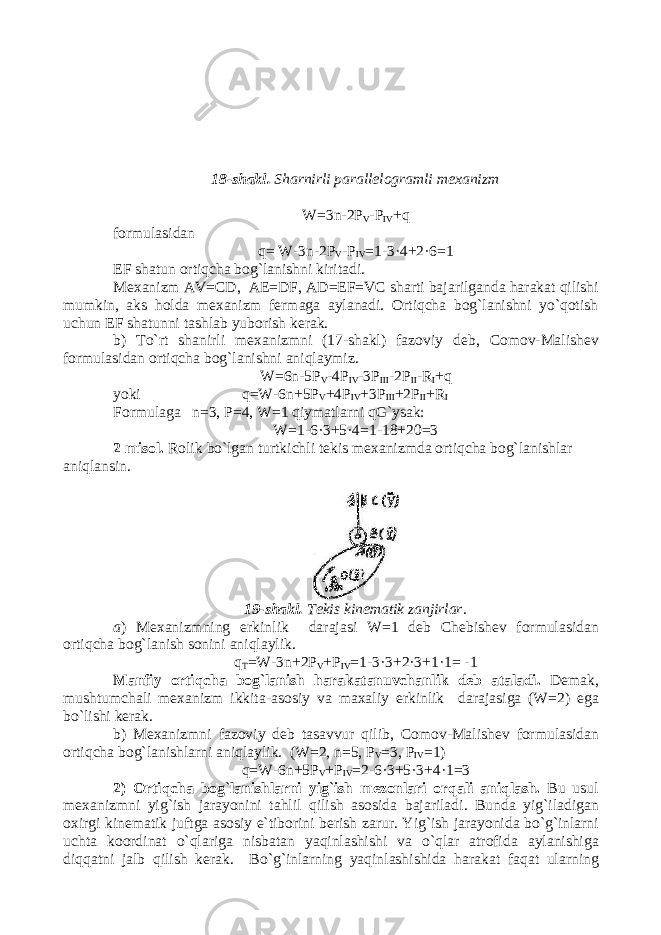
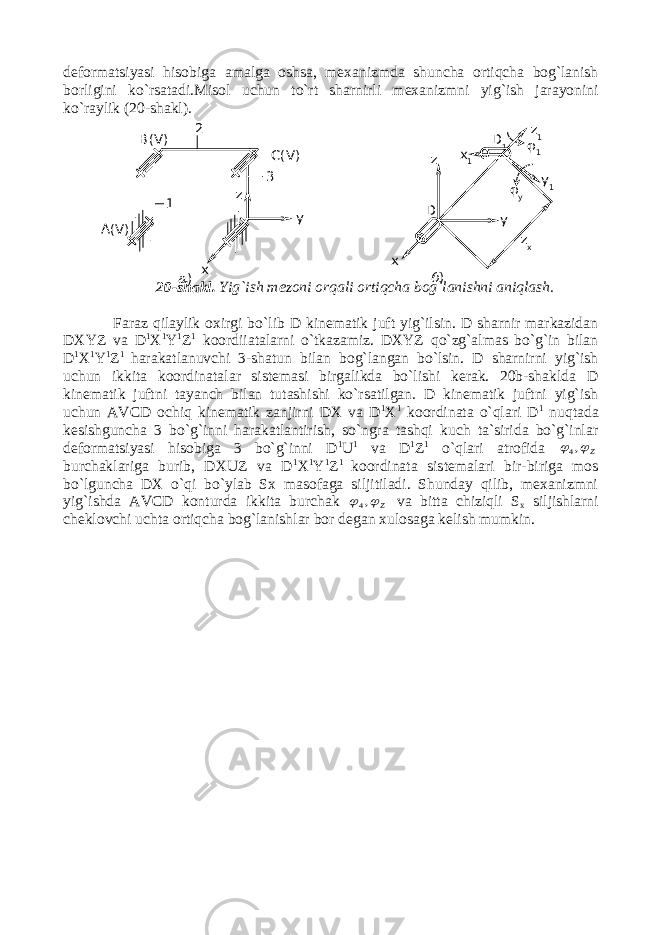
- MАSHINА VА MEXАNIZMLАRNING TUZILISH АSOSLАRI. KINEMАTIK JUFTLАR VА KINEMАTIK ZАNJIRLАR NАZАRIYASI. MEXАNIZMLАRNING ERKINLIK DАRАJАSI
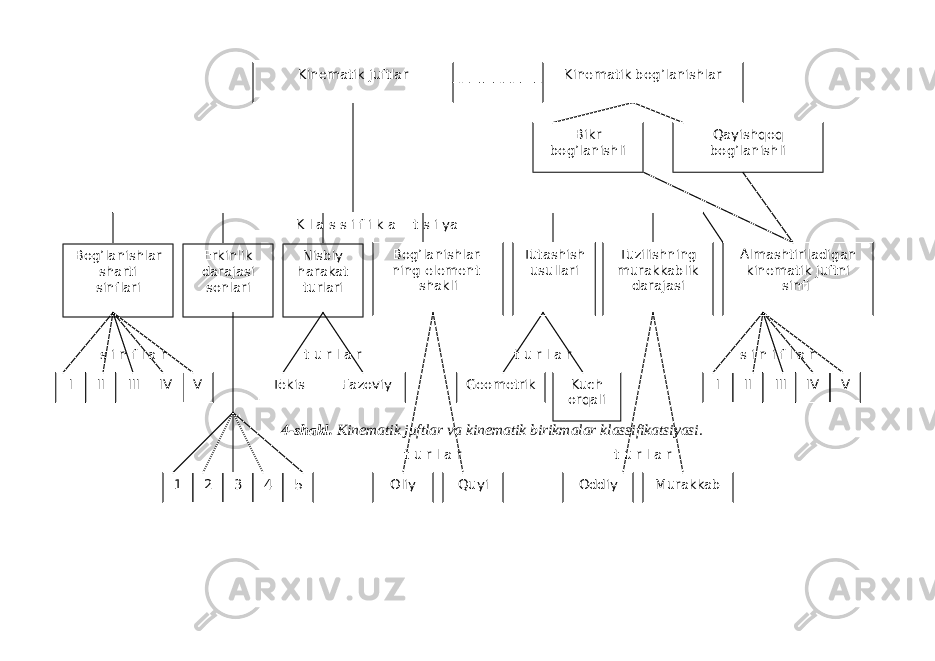
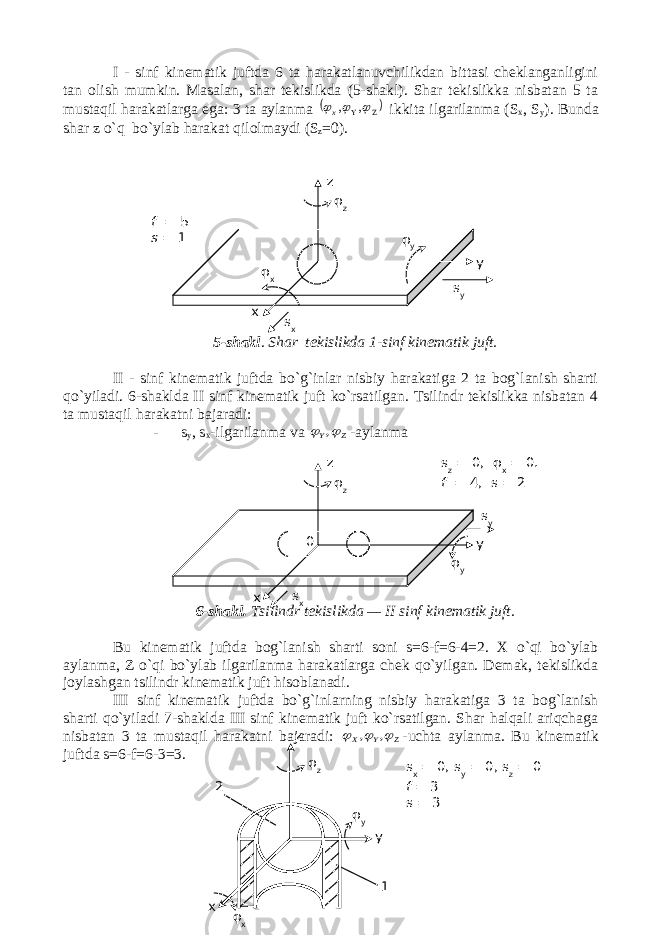
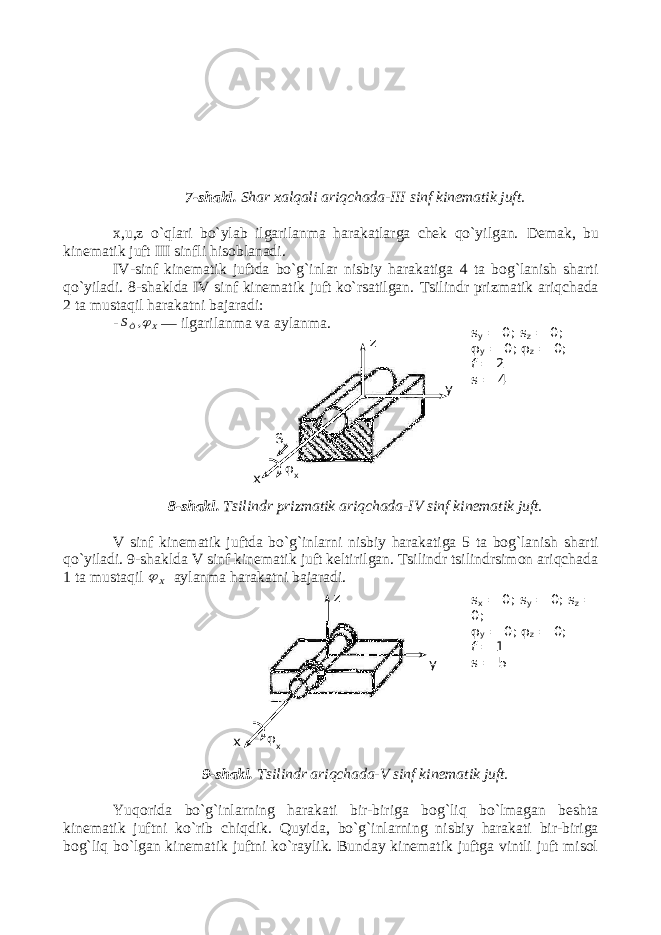
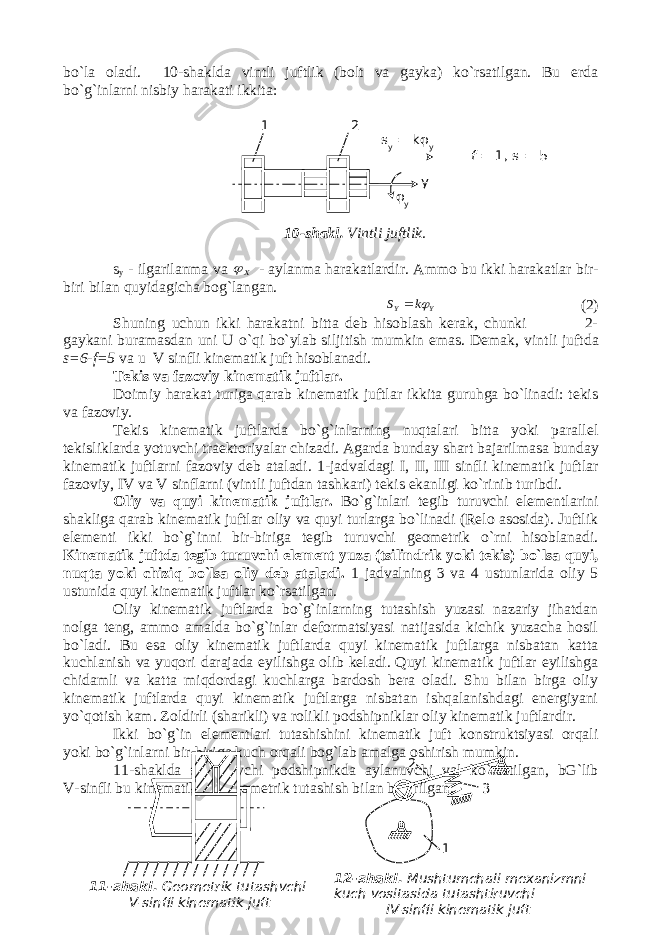
MАSHINА VА MEXАNIZMLАRNING TUZILISH АSOSLАRI. KINEMАTIK JUFTLАR VА KINEMАTIK ZАNJIRLАR NАZАRIYASI. MEXАNIZMLАRNING ERKINLIK DАRАJАSI
Yuklangan vaqt:
20.09.2019