Bosh sahifa
Kurs ishlari
Fizika
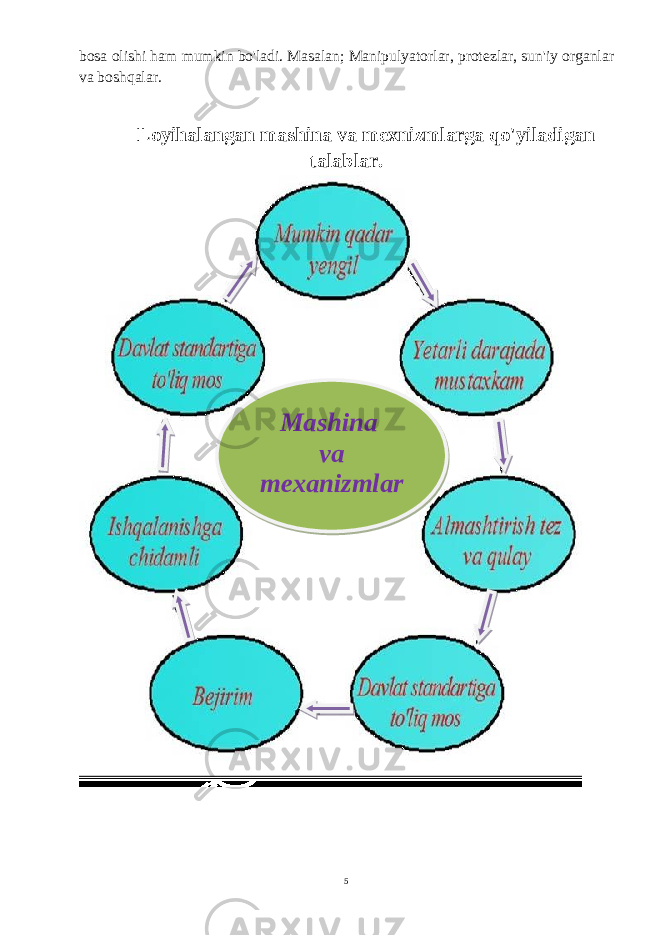
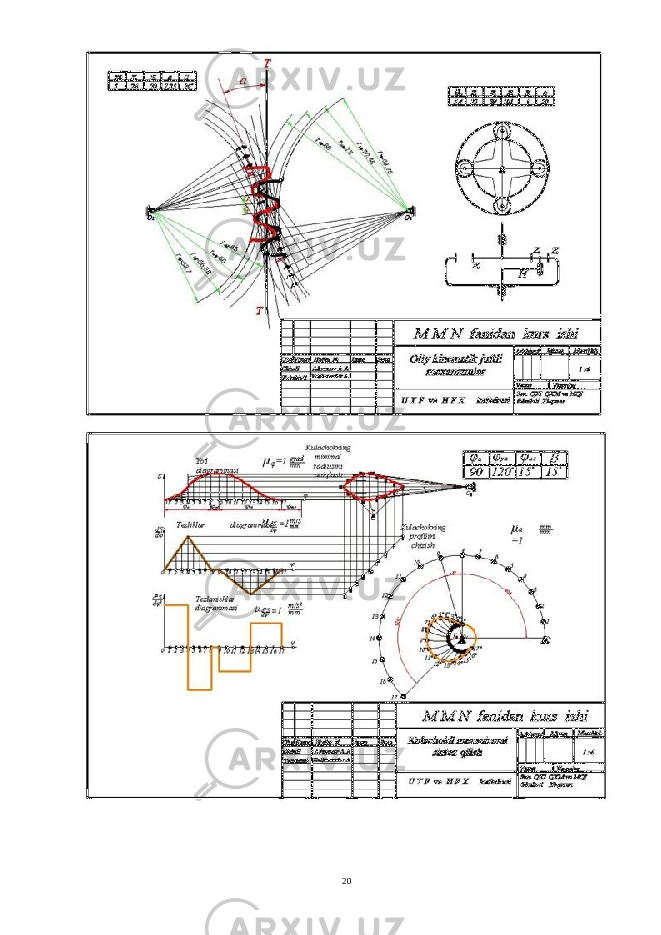
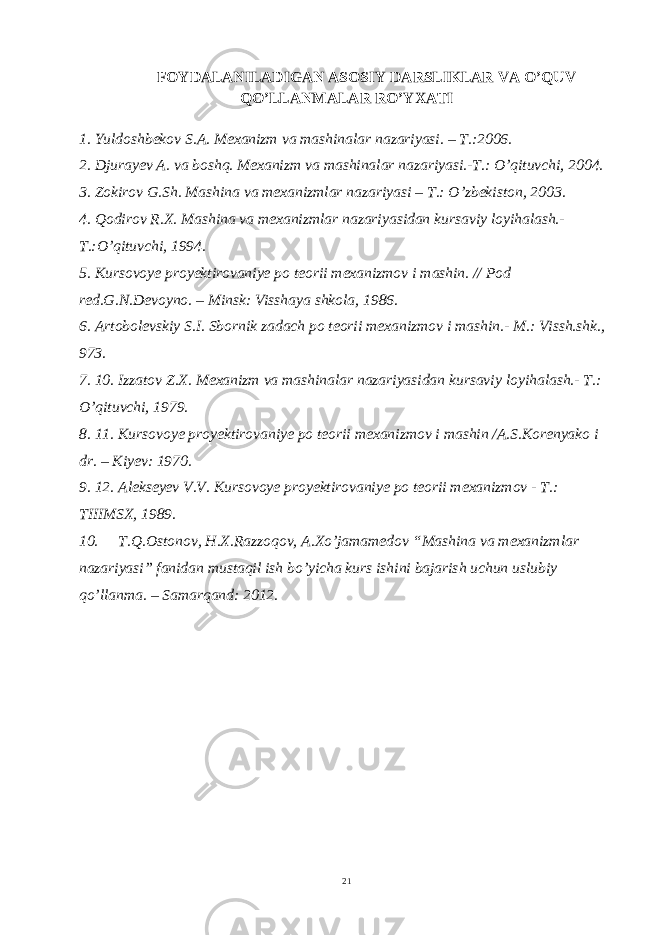
Ikki pog’onali kopressor mexanizmlarini o’rganish va ularni loyihalash
Ikki pog’onali kopressor mexanizmlarini o’rganish va ularni loyihalash
Yuklangan vaqt:
09.10.2022
Ko'chirishlar soni:
0
Hajmi:
806.5 KB
Ko'chirib olish
O'xshashlar
Adabiyot fanini oʻqitishda axborot texnologiyalaridan foydalanish pedagogik mahoratni oshirish omili
Siljish toki haqida. Maksvel