Bosh sahifa
Slaydlar
Astronomiya
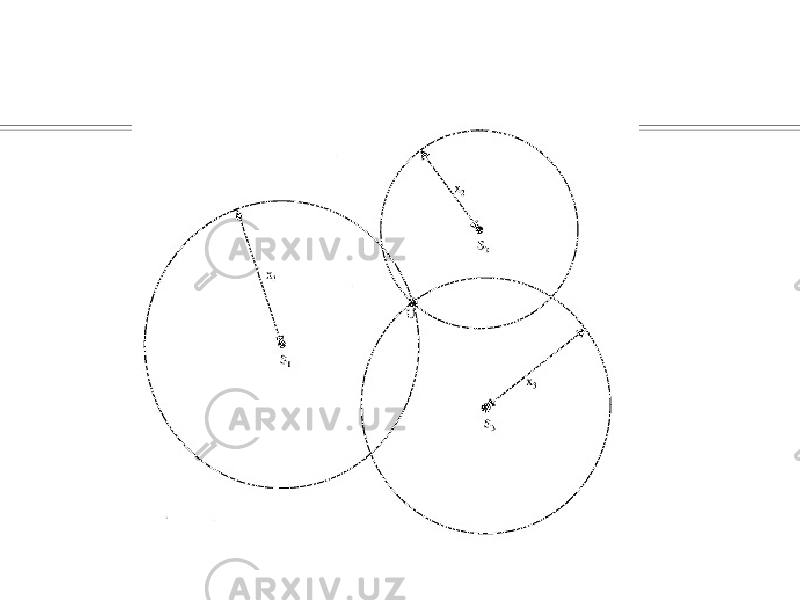
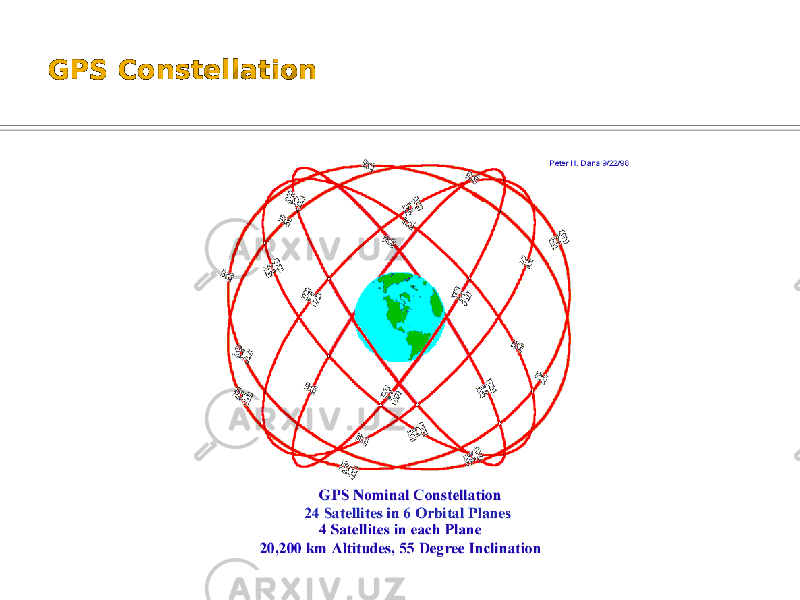
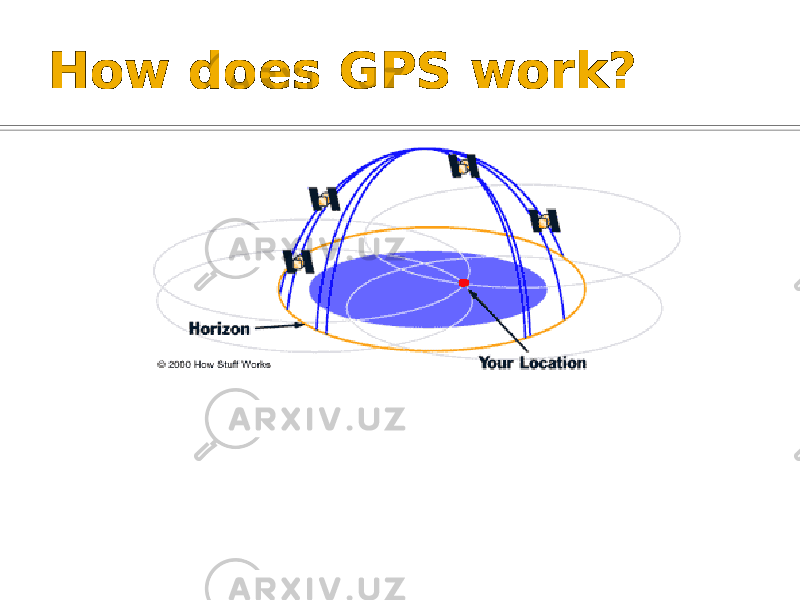
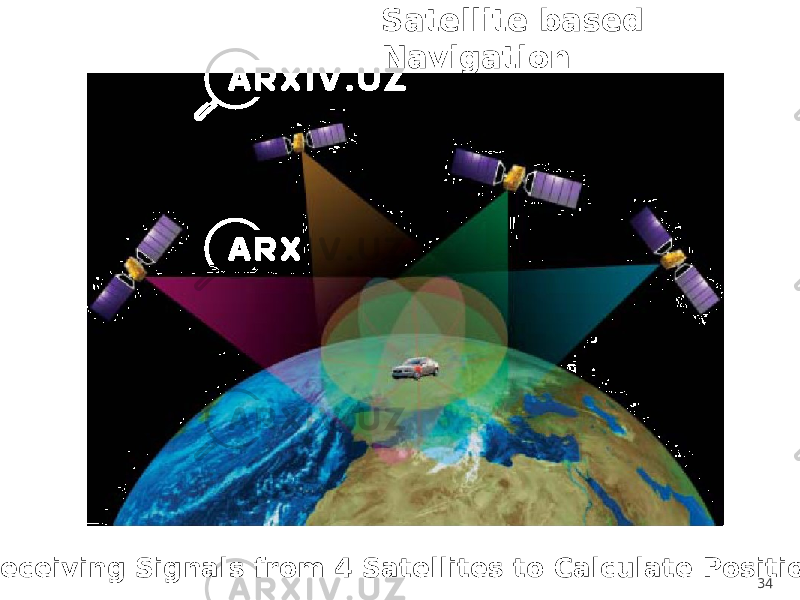
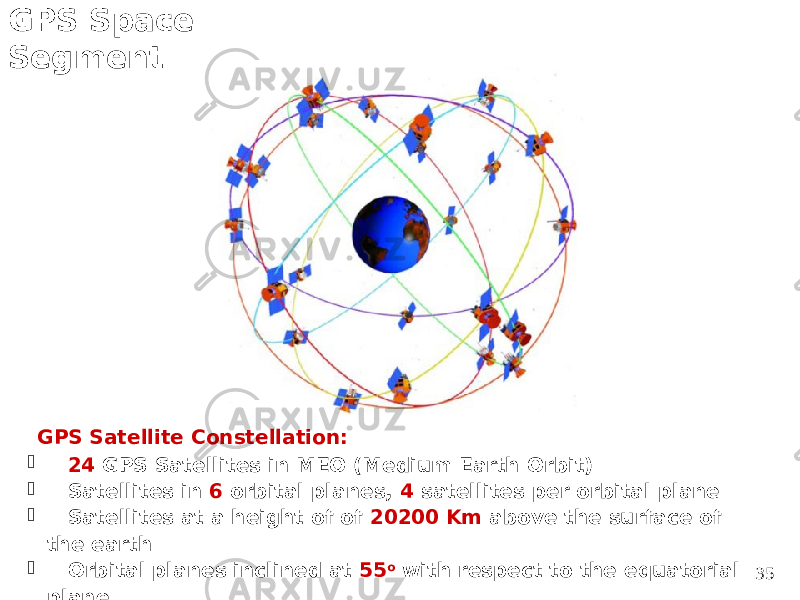
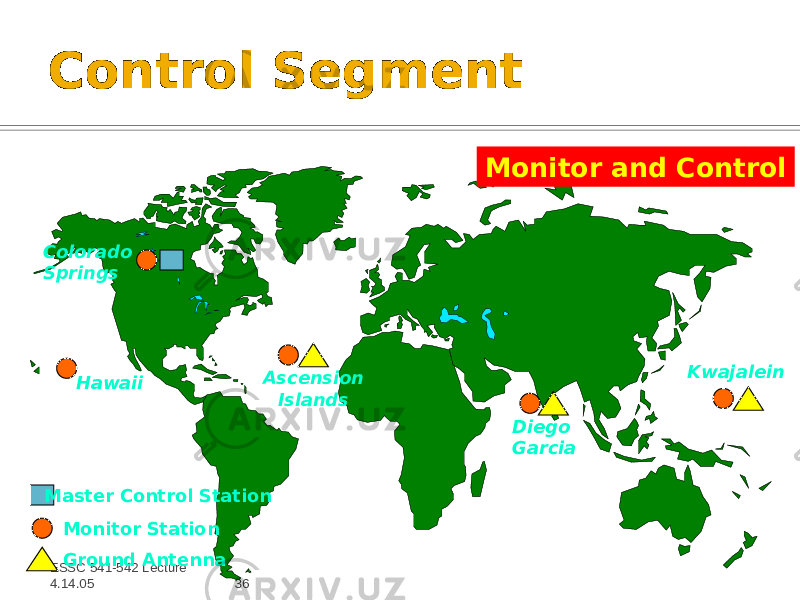
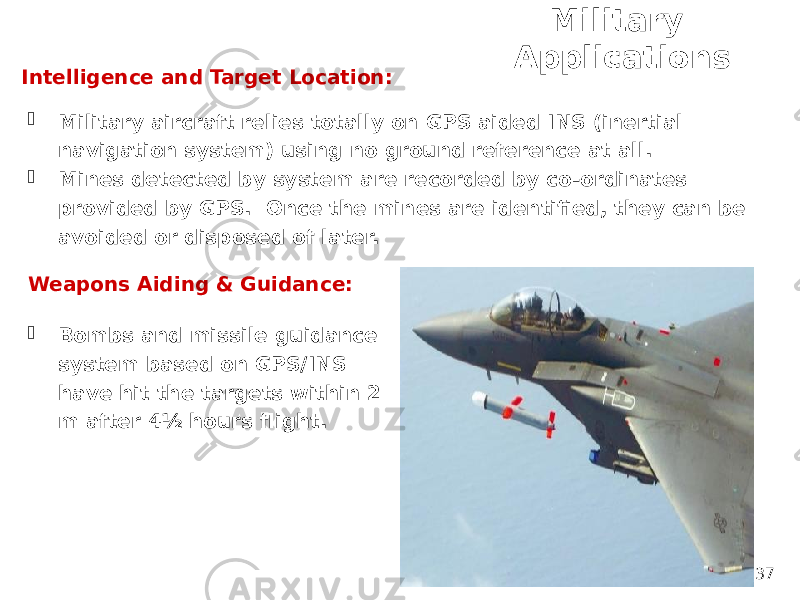
Сунъий йўлдошли глобал навигация тизимлари
Сунъий йўлдошли глобал навигация тизимлари
Yuklangan vaqt:
23.09.2019
Ko'chirishlar soni:
0
Hajmi:
4980.333984375 KB
Ko'chirib olish
O'xshashlar
Yerning o’z o’qi atrofida aylanishi va kattaligi
Ҳижрий-қамарий тақвим
Ўзбекистонда блазарларни кузатиш
RT-70 Radioastronomik kompleksi
Yerning tabiiy yo'ldoshi