- Bosh sahifa
- Referatlar
- Mashinasozlik
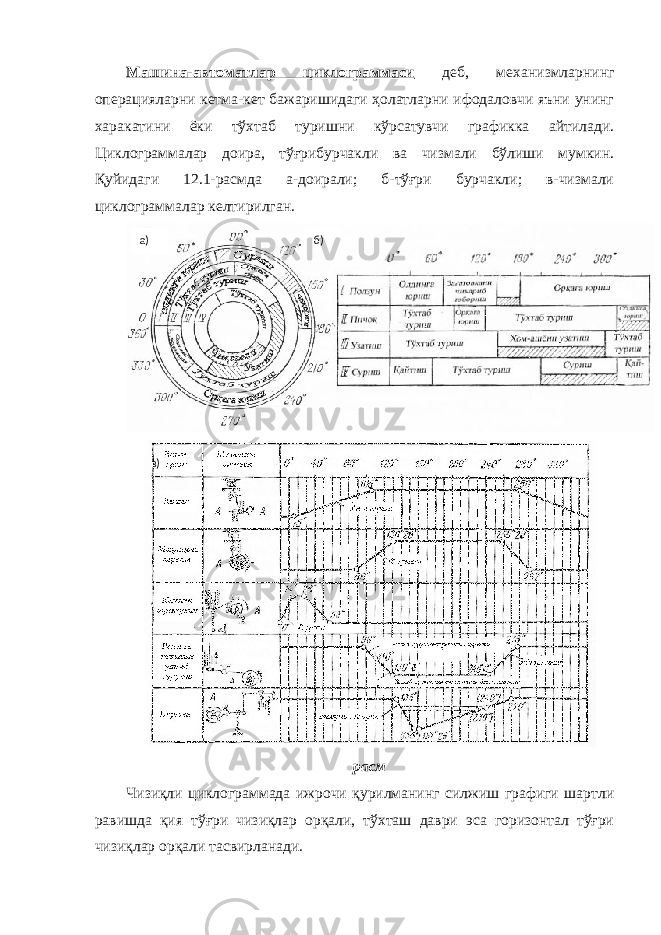
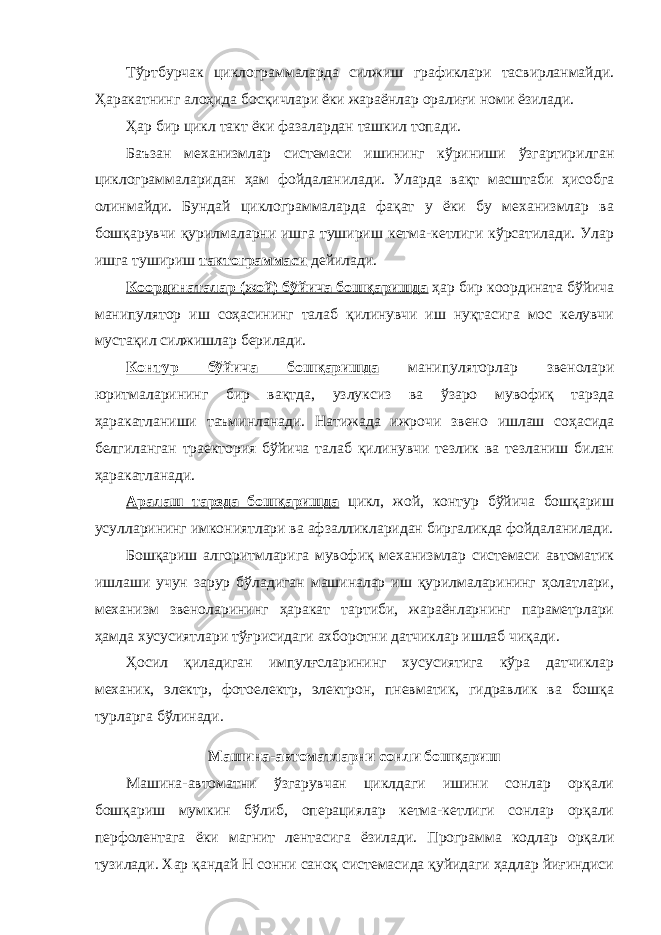
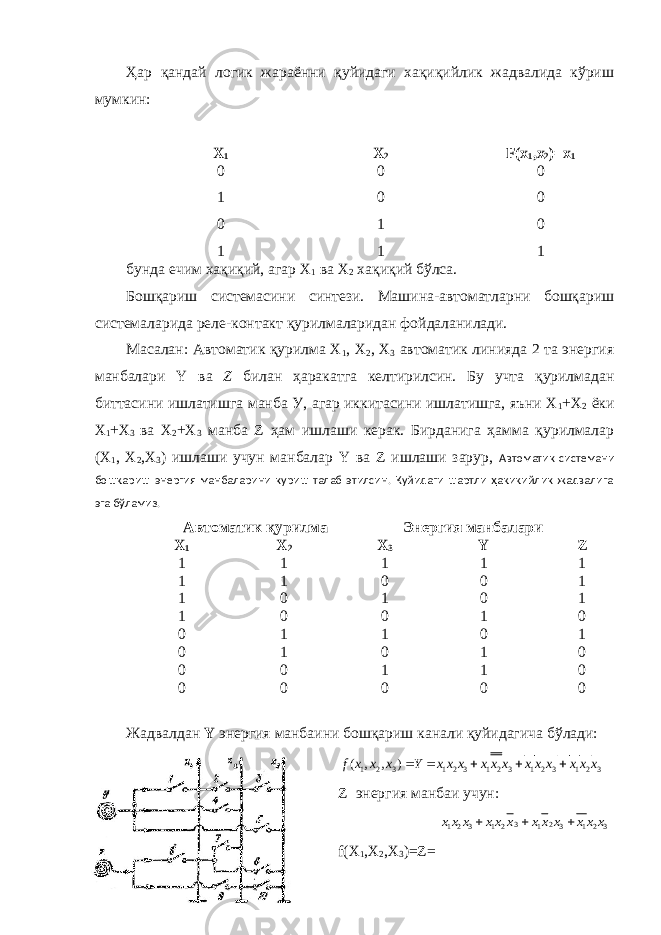
- Машина автоматлар назариясининг асосий тушунчалари. Робот ва манипуляторлар назариясининг асосий тушунчалари ва уларнинг қўлланилиши
Машина автоматлар назариясининг асосий тушунчалари. Робот ва манипуляторлар назариясининг асосий тушунчалари ва уларнинг қўлланилиши
Yuklangan vaqt:
20.09.2019