- Bosh sahifa
- Referatlar
- Mashinasozlik
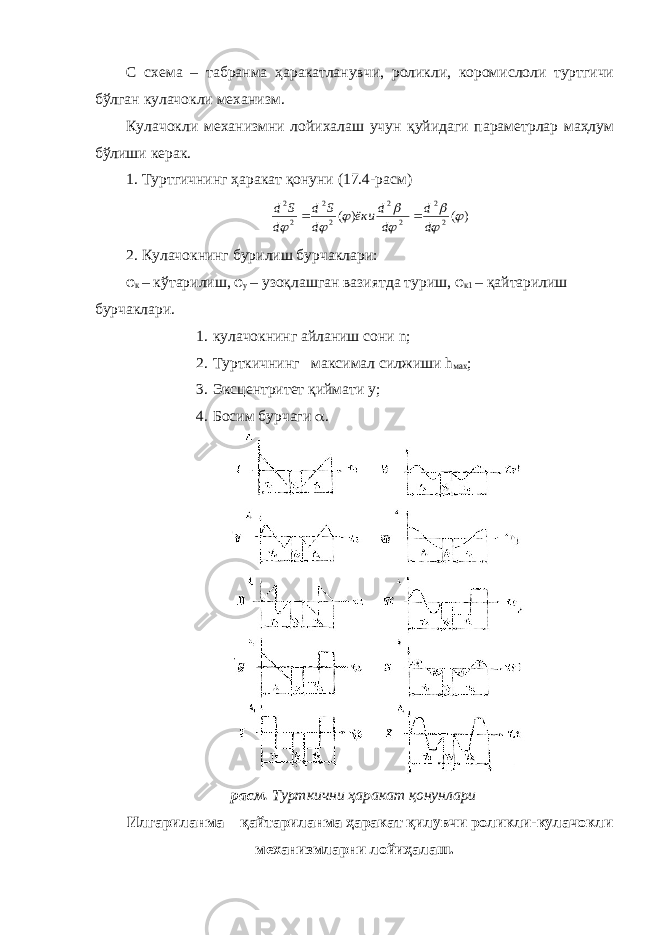
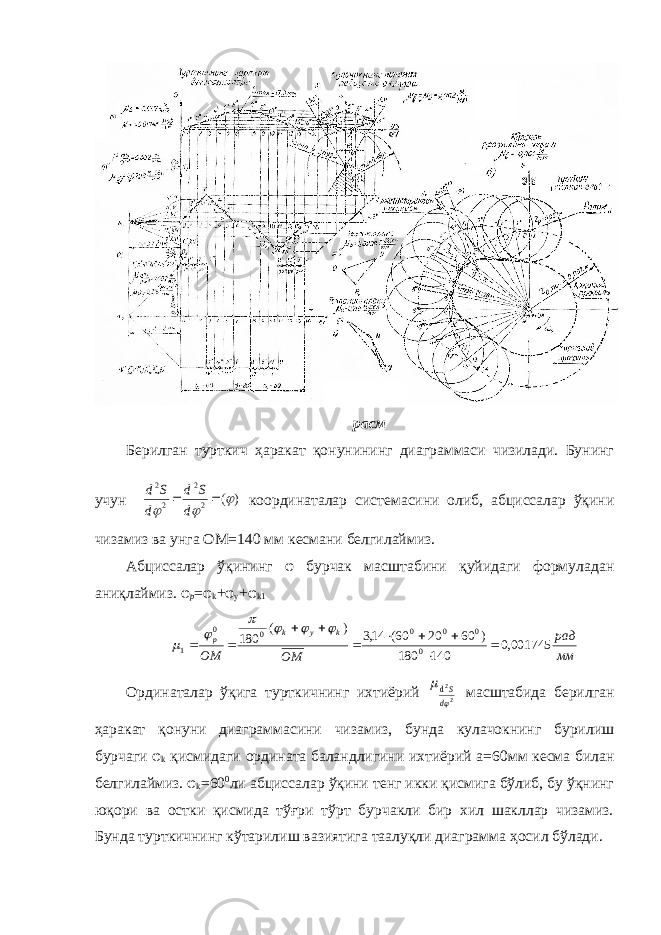
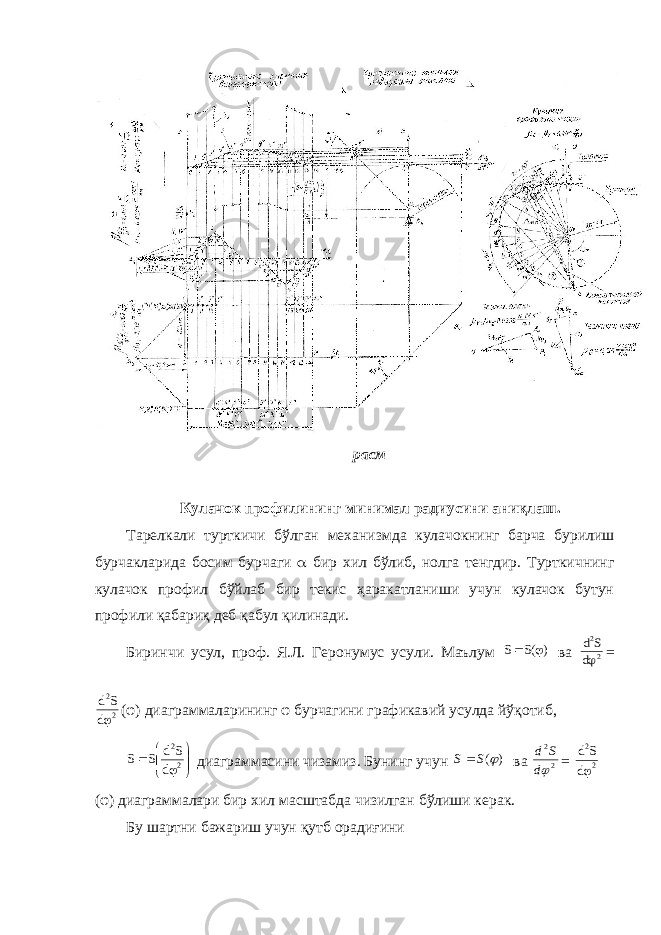
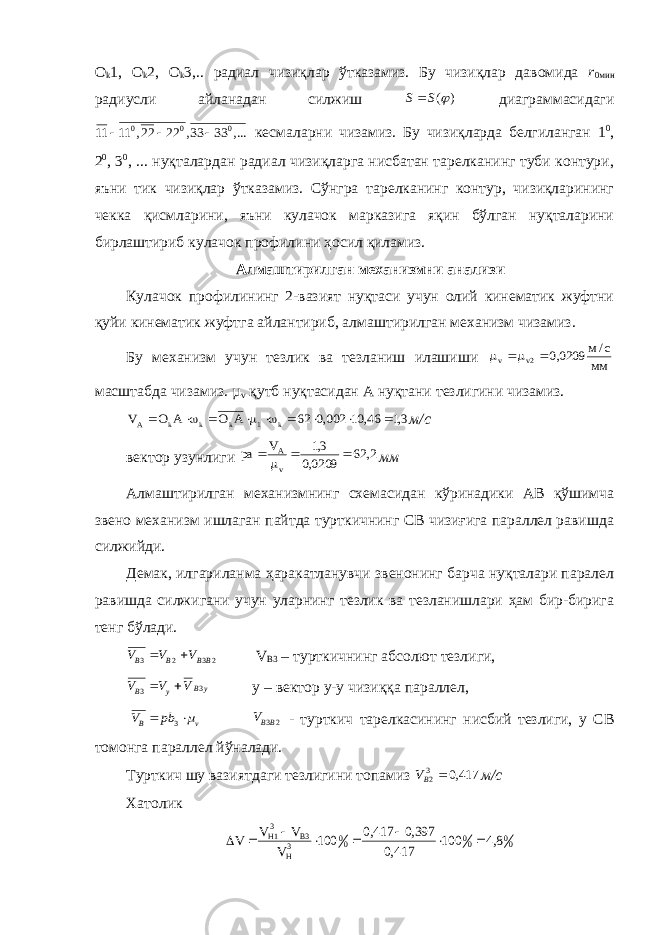
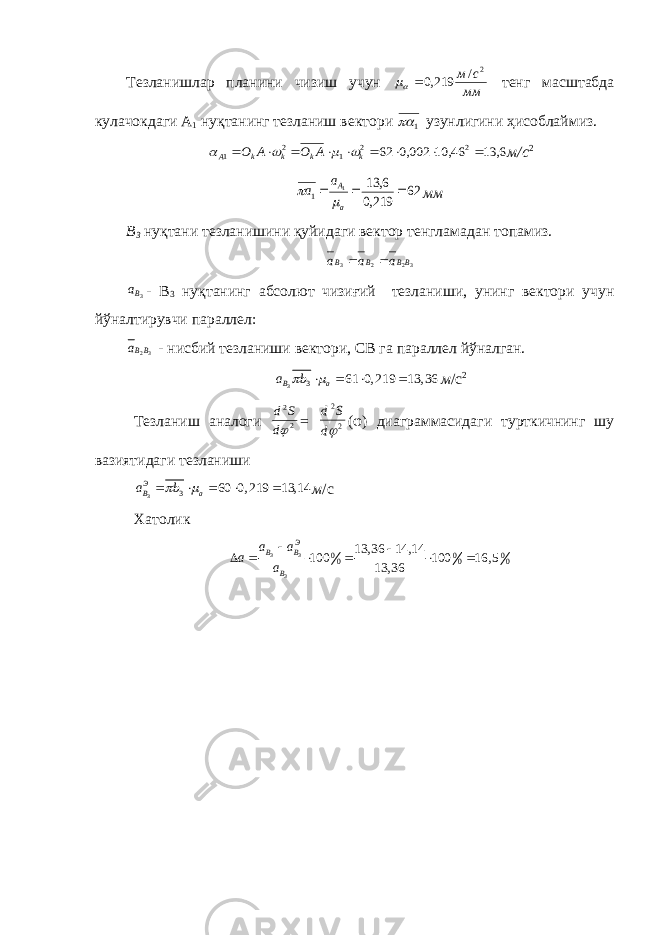
- Кулачокли механизмларнинг лойиҳалаш тартиби. Илгариланма-қайтма ҳаракат қилувчи роликли кулачокли механизмларни лойиҳалаш
Кулачокли механизмларнинг лойиҳалаш тартиби. Илгариланма-қайтма ҳаракат қилувчи роликли кулачокли механизмларни лойиҳалаш
Yuklangan vaqt:
20.09.2019