- Bosh sahifa
- Referatlar
- Informatika va AT
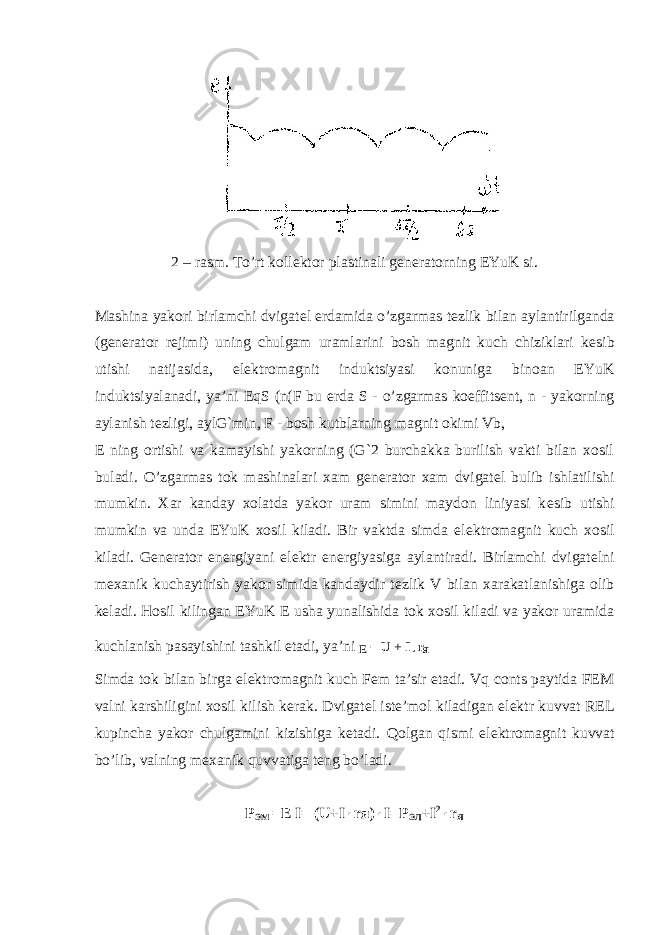
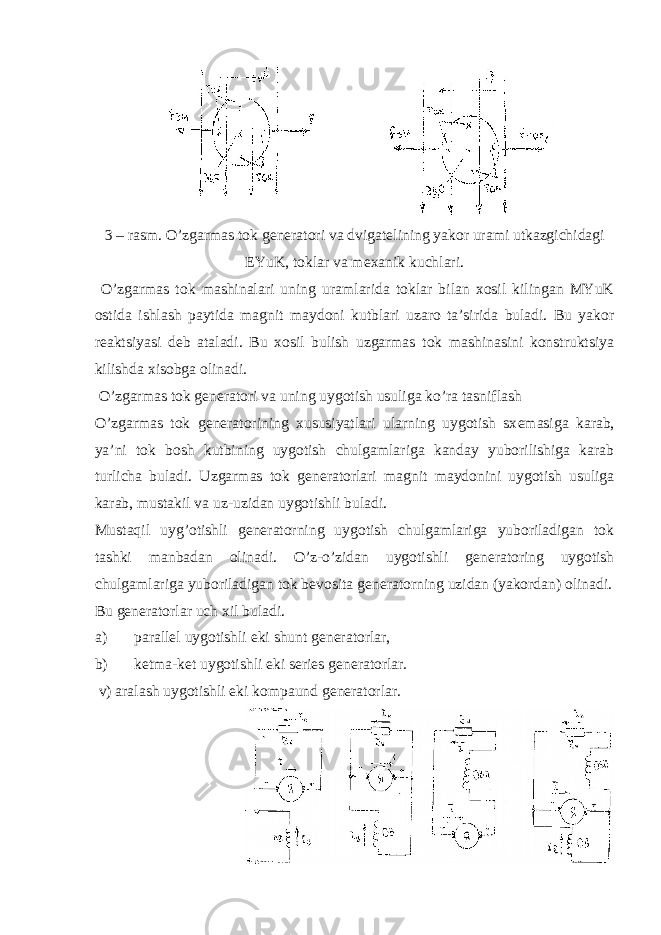
- Ijro qiluvchi doimiy tok dvigatellarini ishlash printsipi, konstruktsiyalari, ishga tushirish va himoya qilish sxemalari. Kontaktsiz dvigatellar
Ijro qiluvchi doimiy tok dvigatellarini ishlash printsipi, konstruktsiyalari, ishga tushirish va himoya qilish sxemalari. Kontaktsiz dvigatellar
Yuklangan vaqt:
15.11.2022