- Главная страница
- Рефераты
- Машиностроение
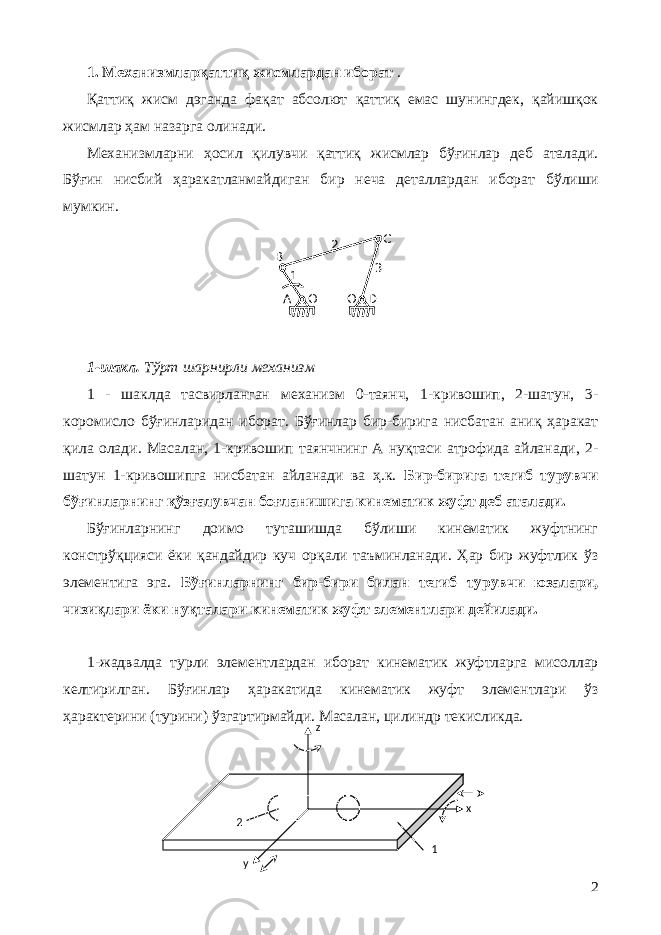
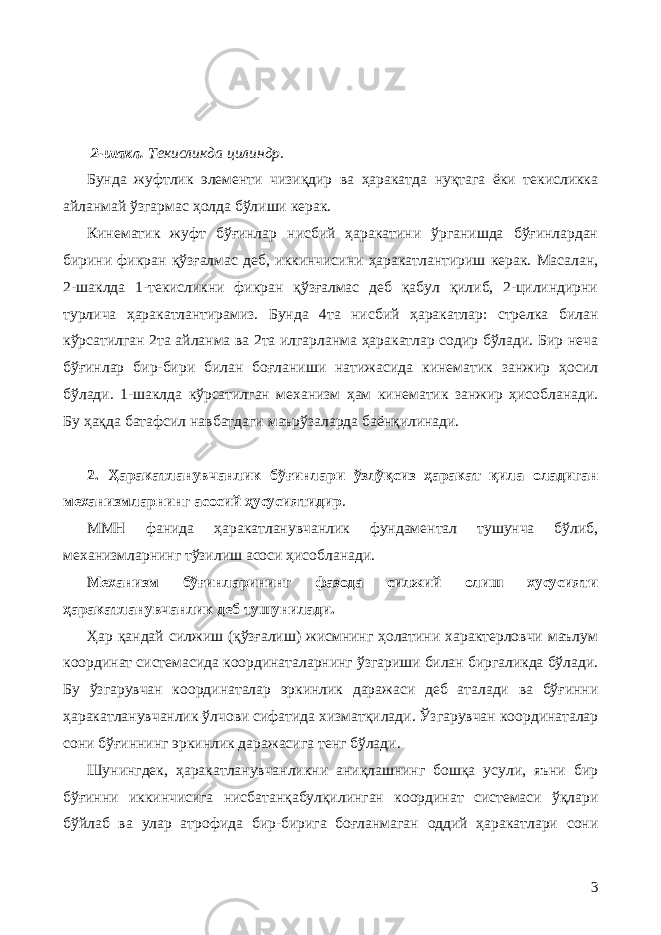
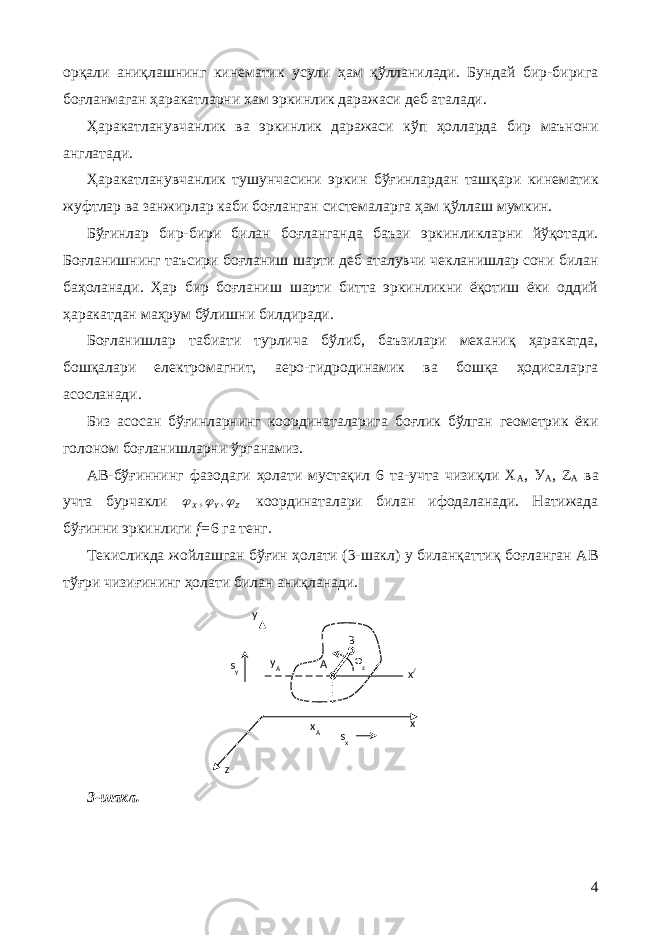
- Машина ва мeханизмларнинг тўзилиш асослари кинeматик жуфтлар ва кинeматик занжирлар назарияси мeханизмларнинг эркинлик даражаси
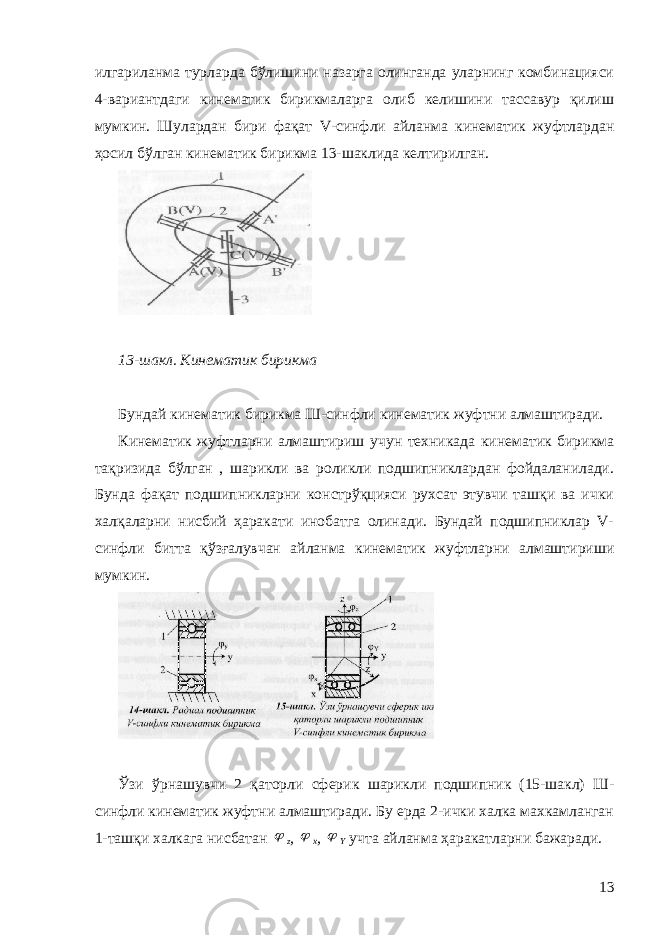
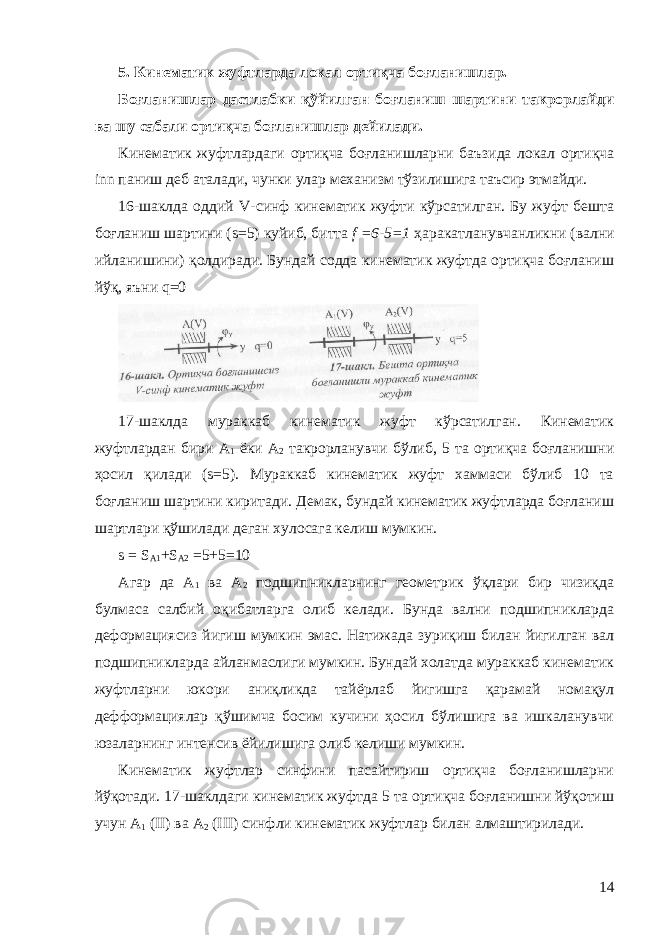
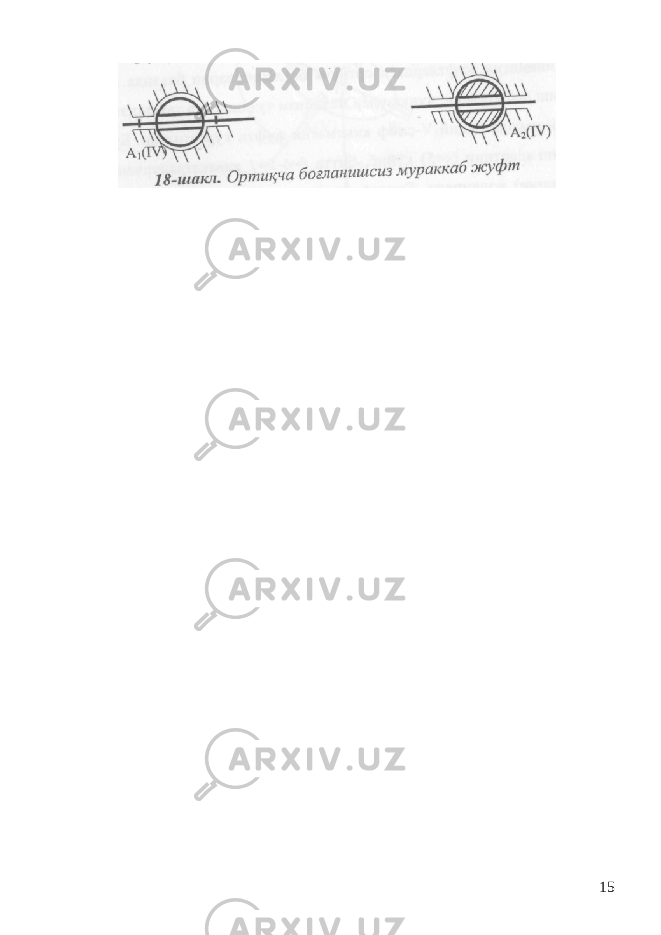
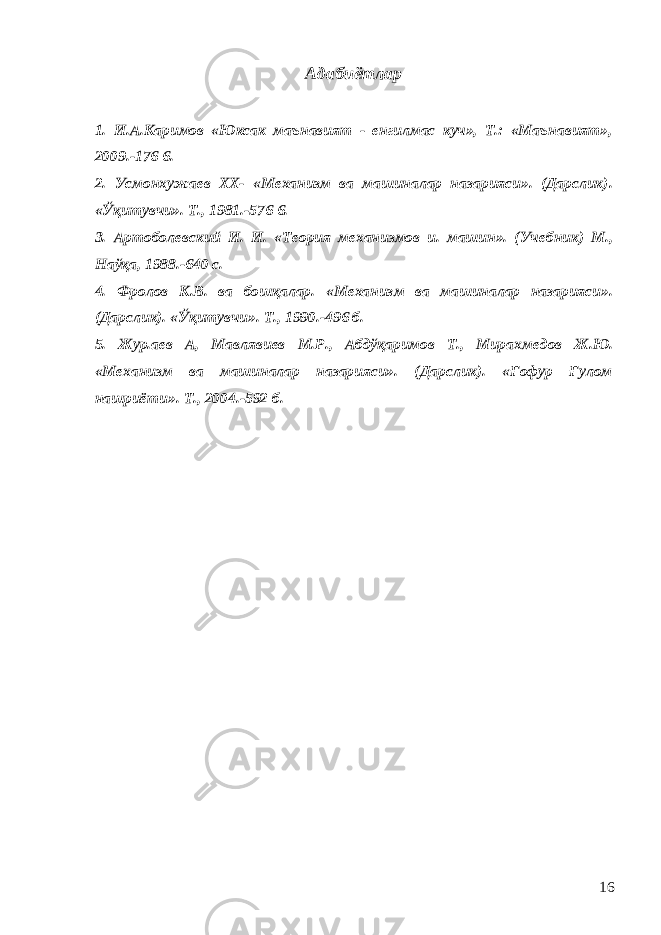
Машина ва мeханизмларнинг тўзилиш асослари кинeматик жуфтлар ва кинeматик занжирлар назарияси мeханизмларнинг эркинлик даражаси